The objective of this project is to develop a fully functional four-wheel-drive RC car capable of competing and performing effectively on inclined planes ranging from 0 to 90 degrees.
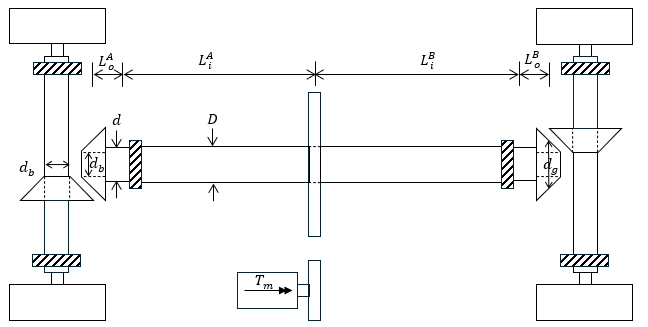
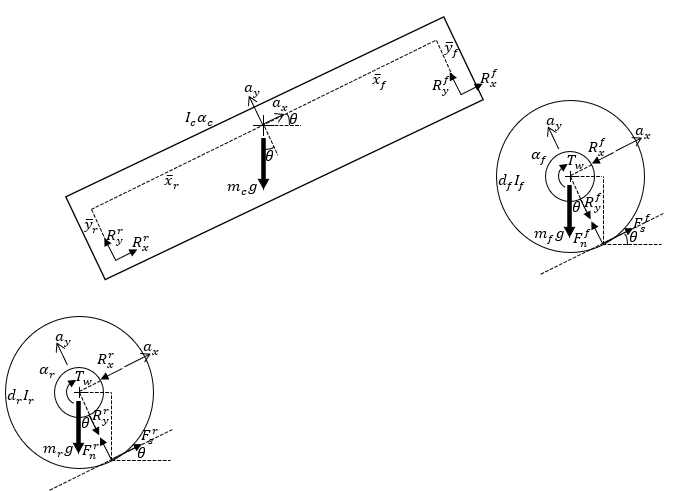
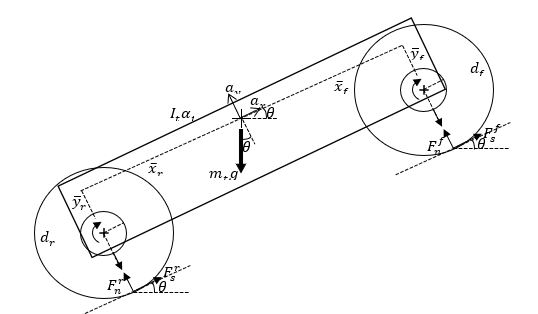
The half-car model analysis evaluates forces acting on a vehicle during dynamic events to optimize key components like the drive shaft and axles. By calculating stress and fatigue life using D.E. Goodman’s Infinite Life Criterion, this process ensures components meet safety and performance goals. Applied to a simplified 4WD RC car, the analysis explores the relationship between dimensions, mass, and dynamic loads, guiding the design of a strong, efficient chassis and improved acceleration performance.
Above is a link to the complete technical analysis.
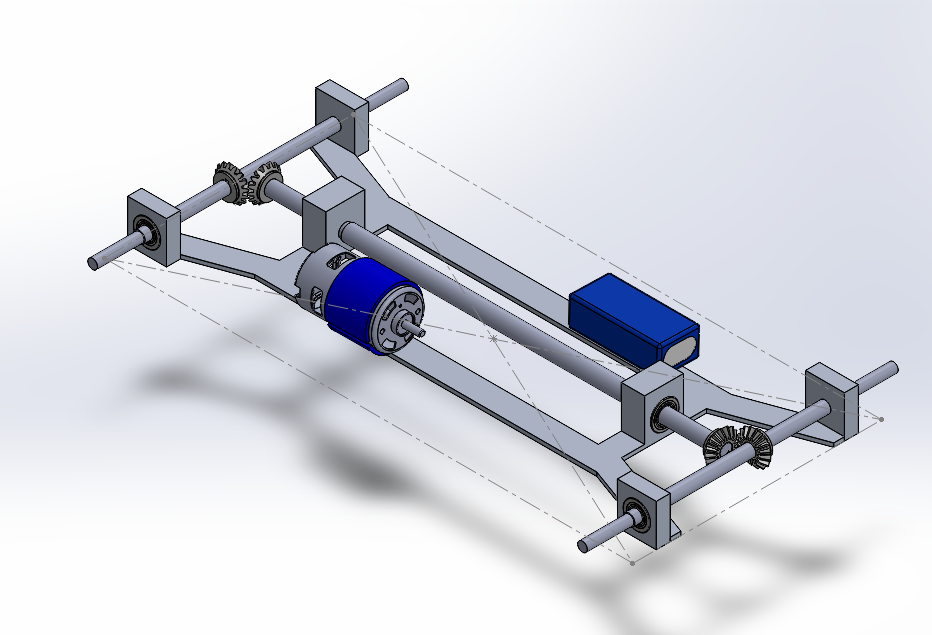
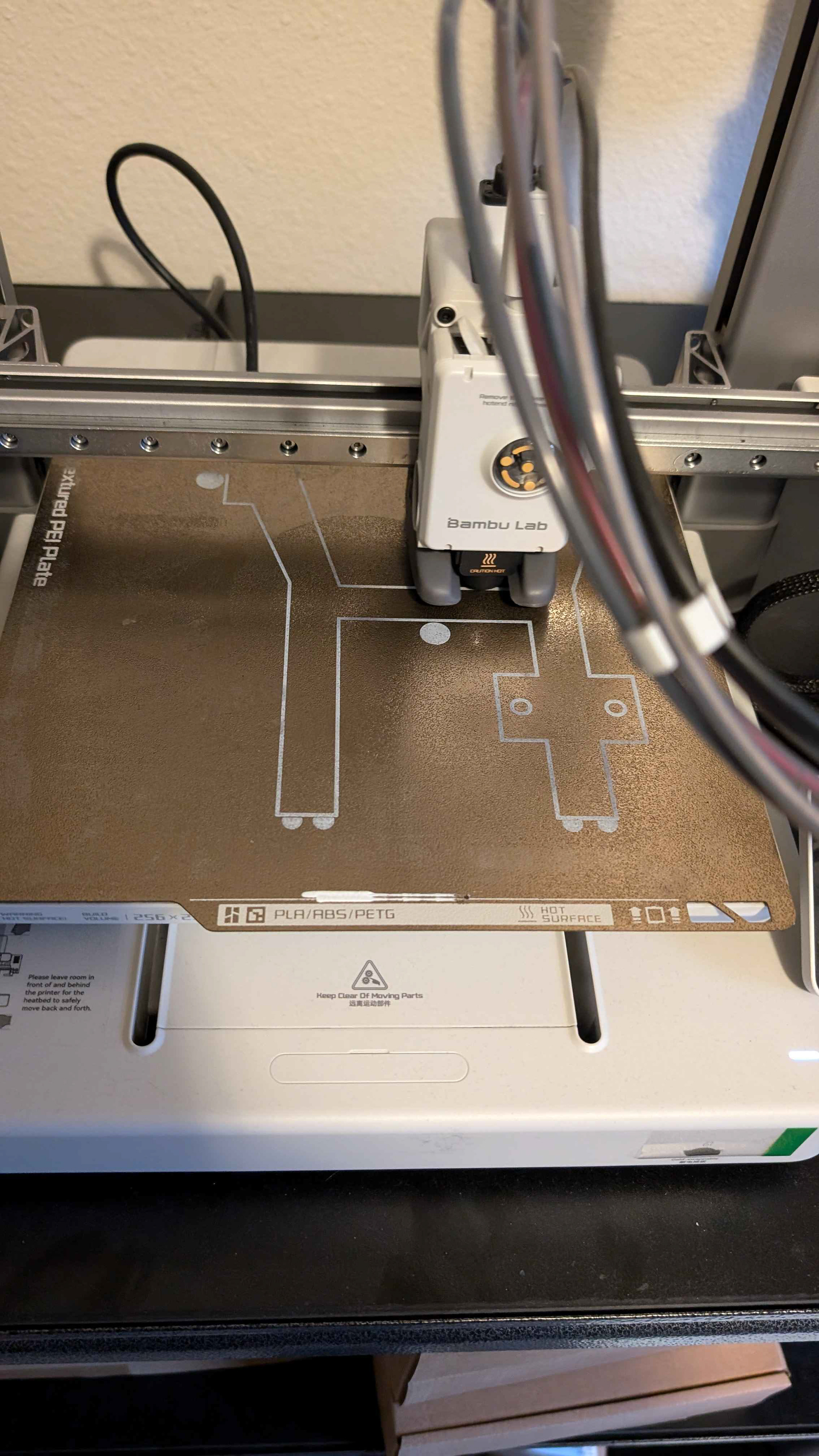
Once the theoretical and technical parameters are established, preliminary sketches and initial iterations of the car can be developed for design review and testing. The utilization of 3D printing facilitates rapid prototyping, enabling efficient evaluation and refinement of design concepts.
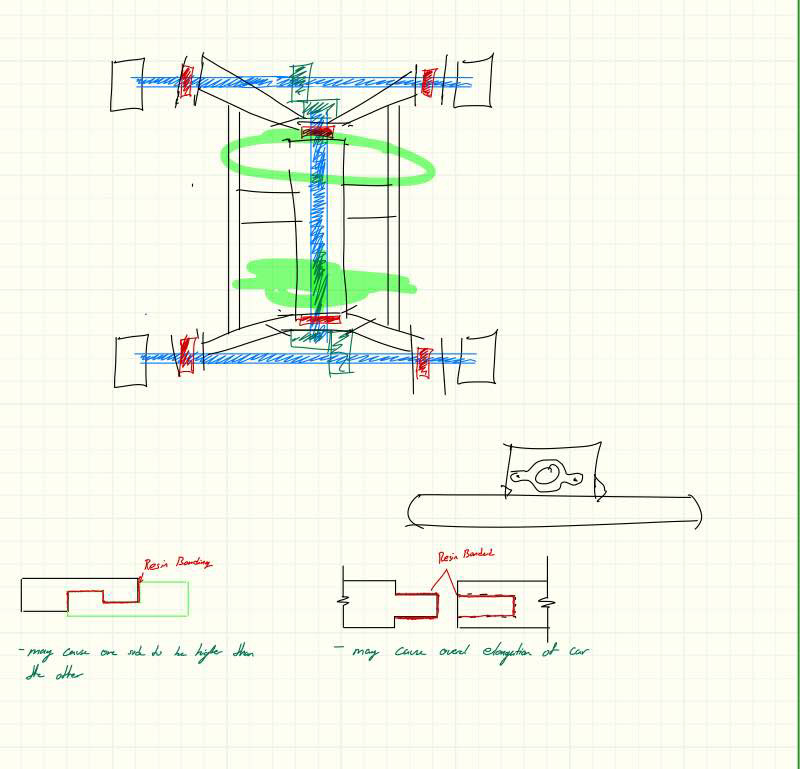
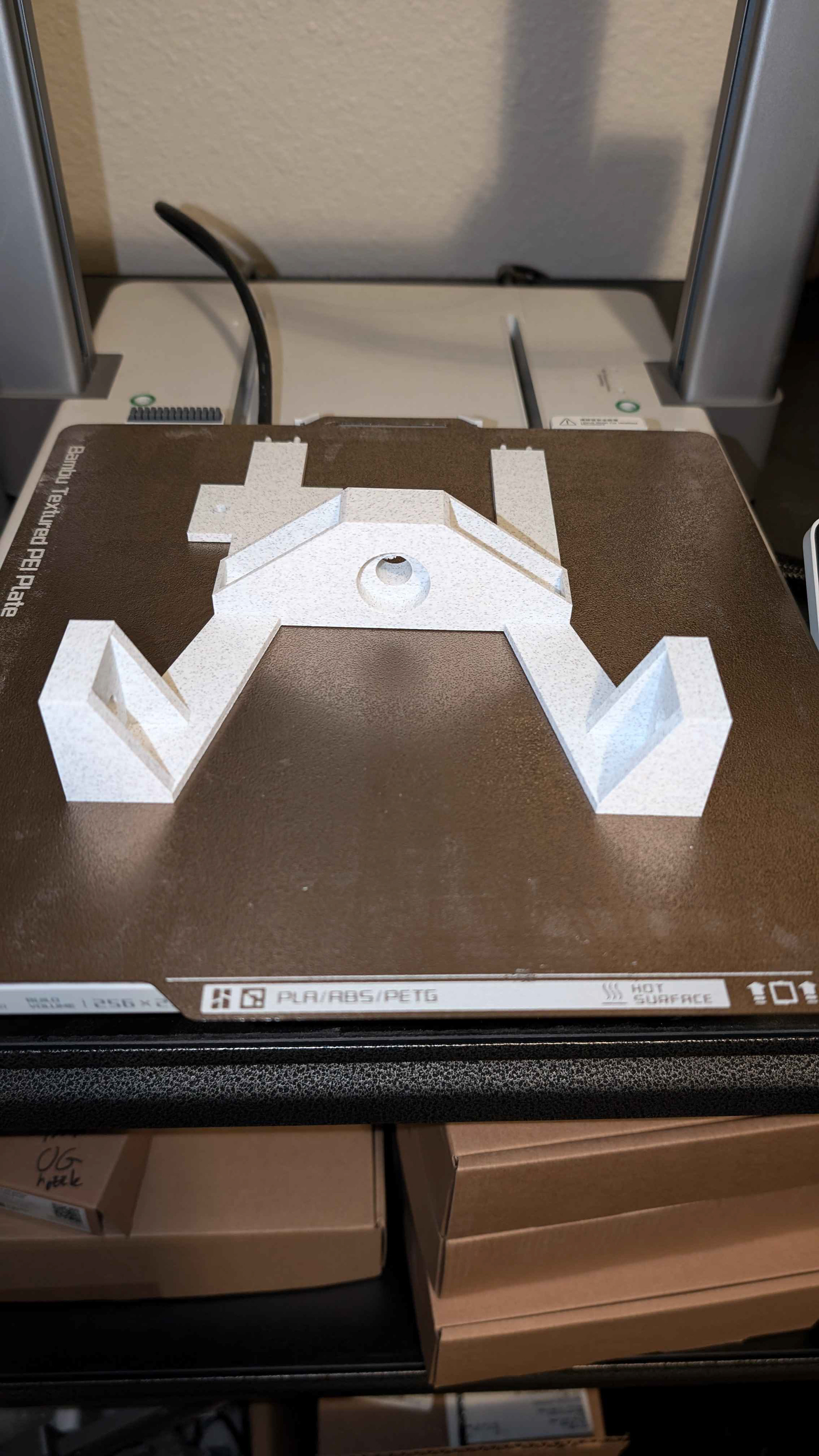
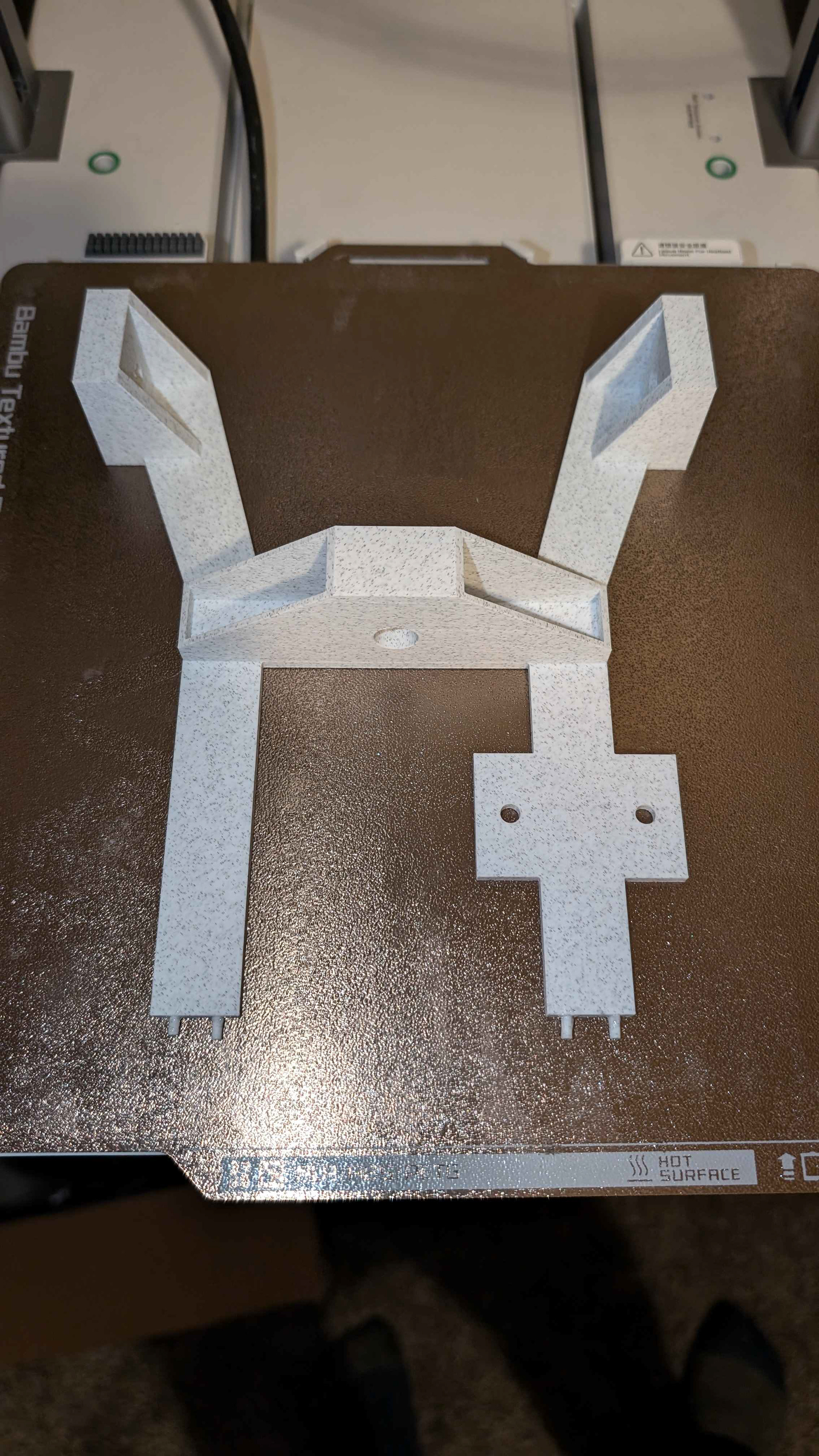

The initial version of the chassis revealed significant structural weaknesses, including excessive bending near the bearing mounts and the chassis center. To address these critical issues, conceptual sketches were developed to identify and implement effective solutions.
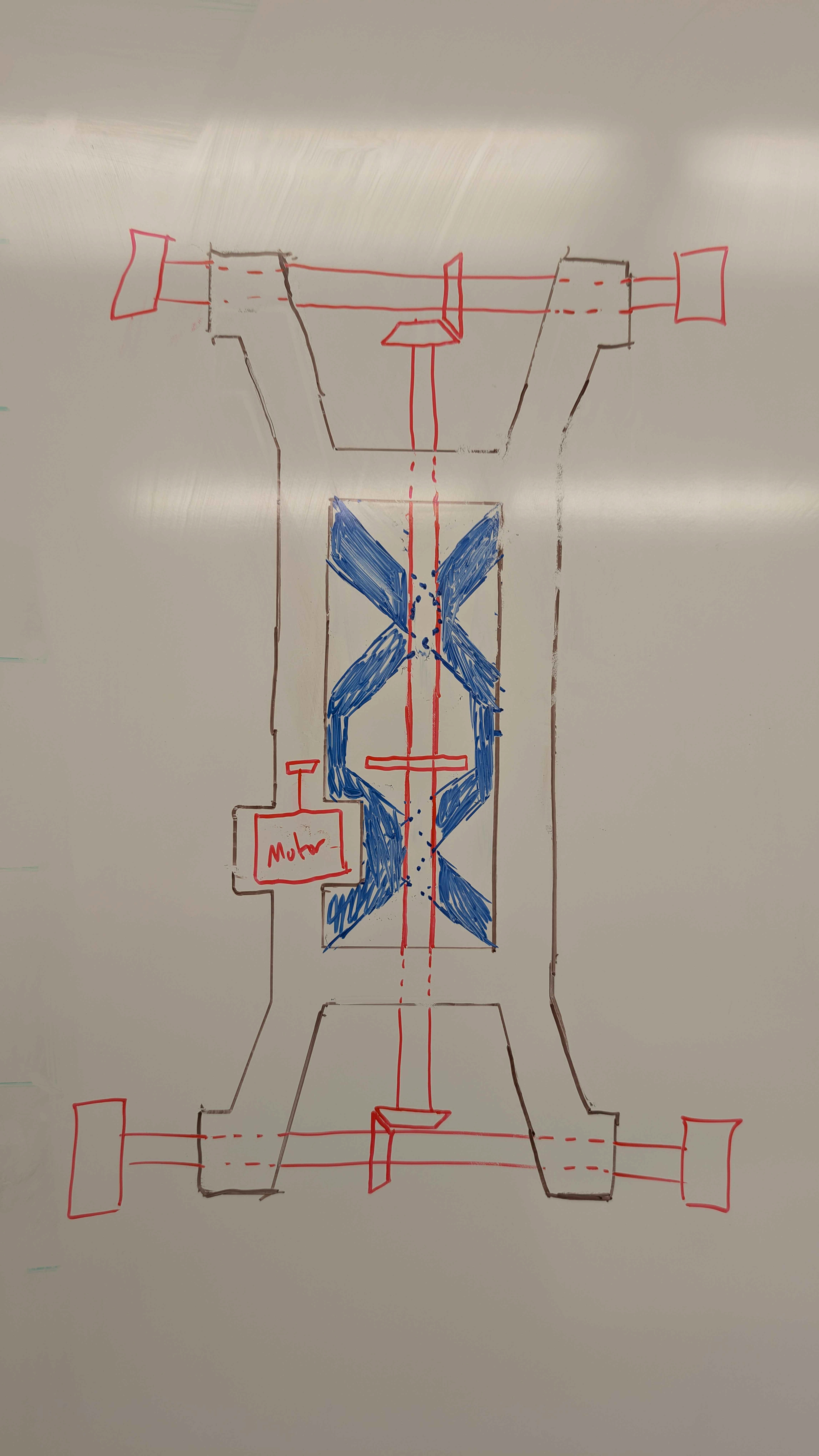
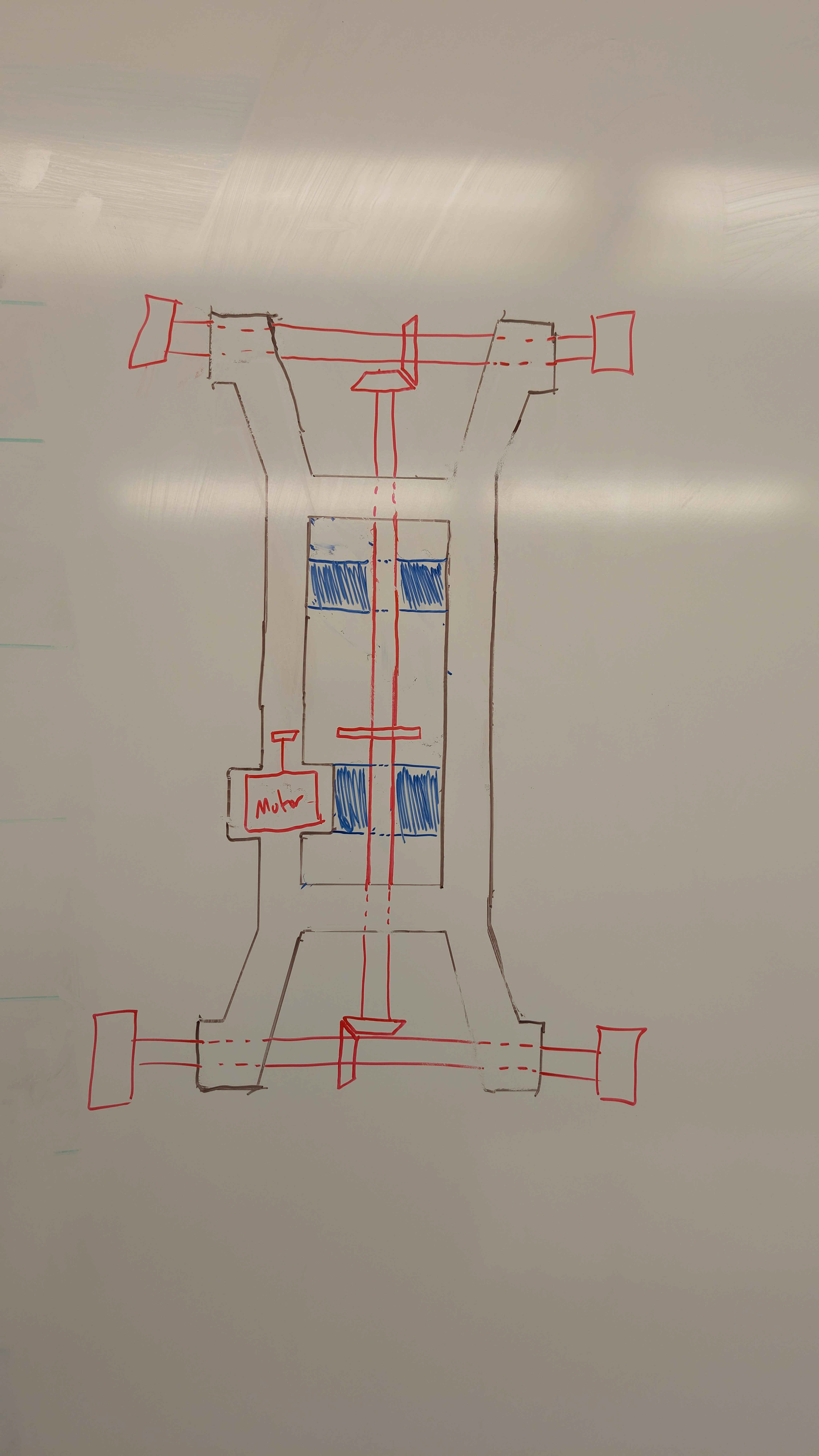
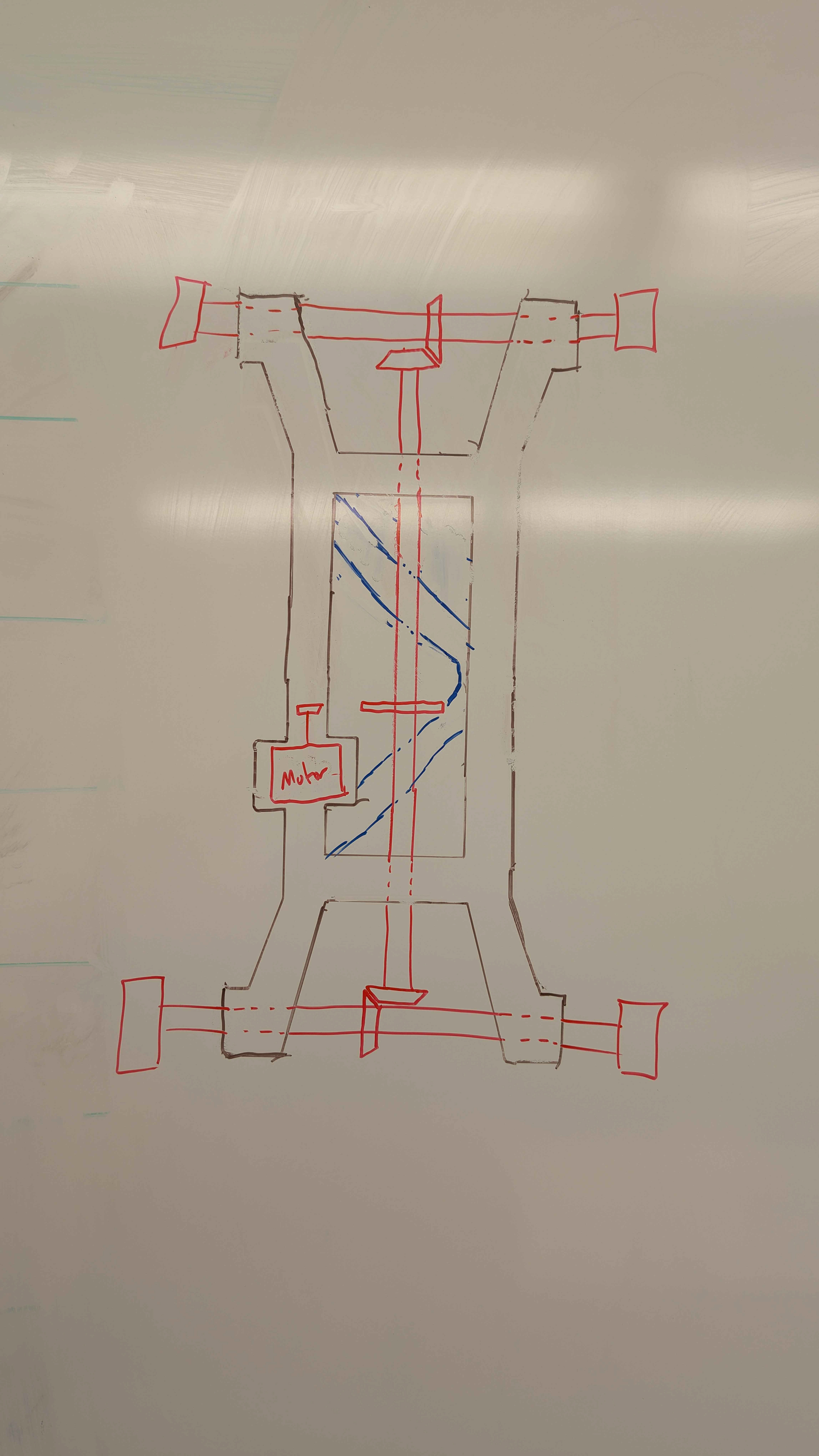
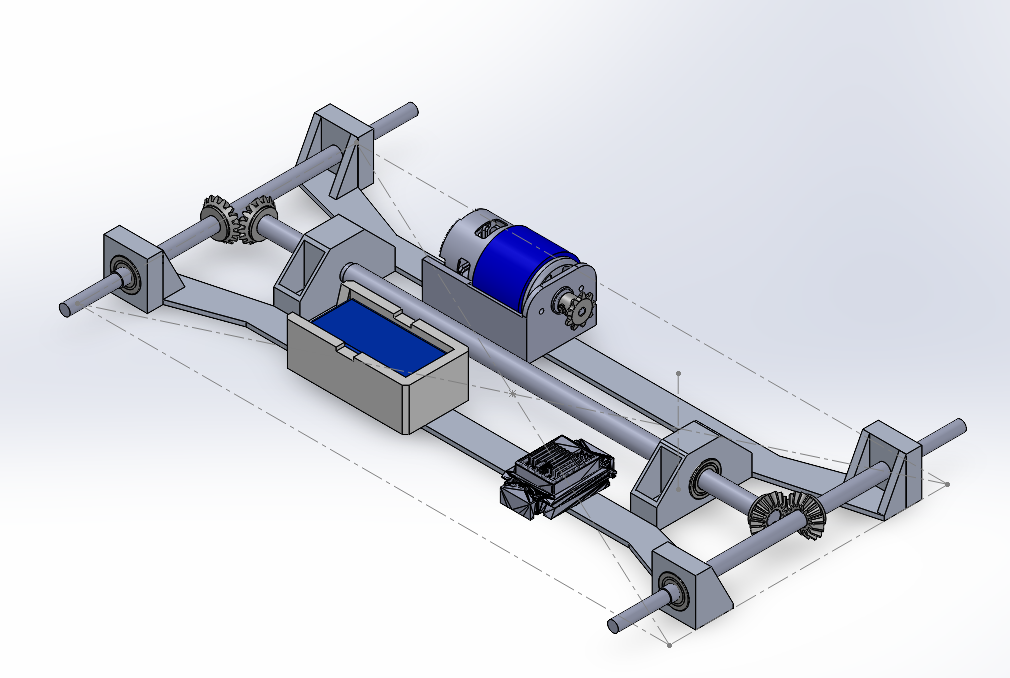
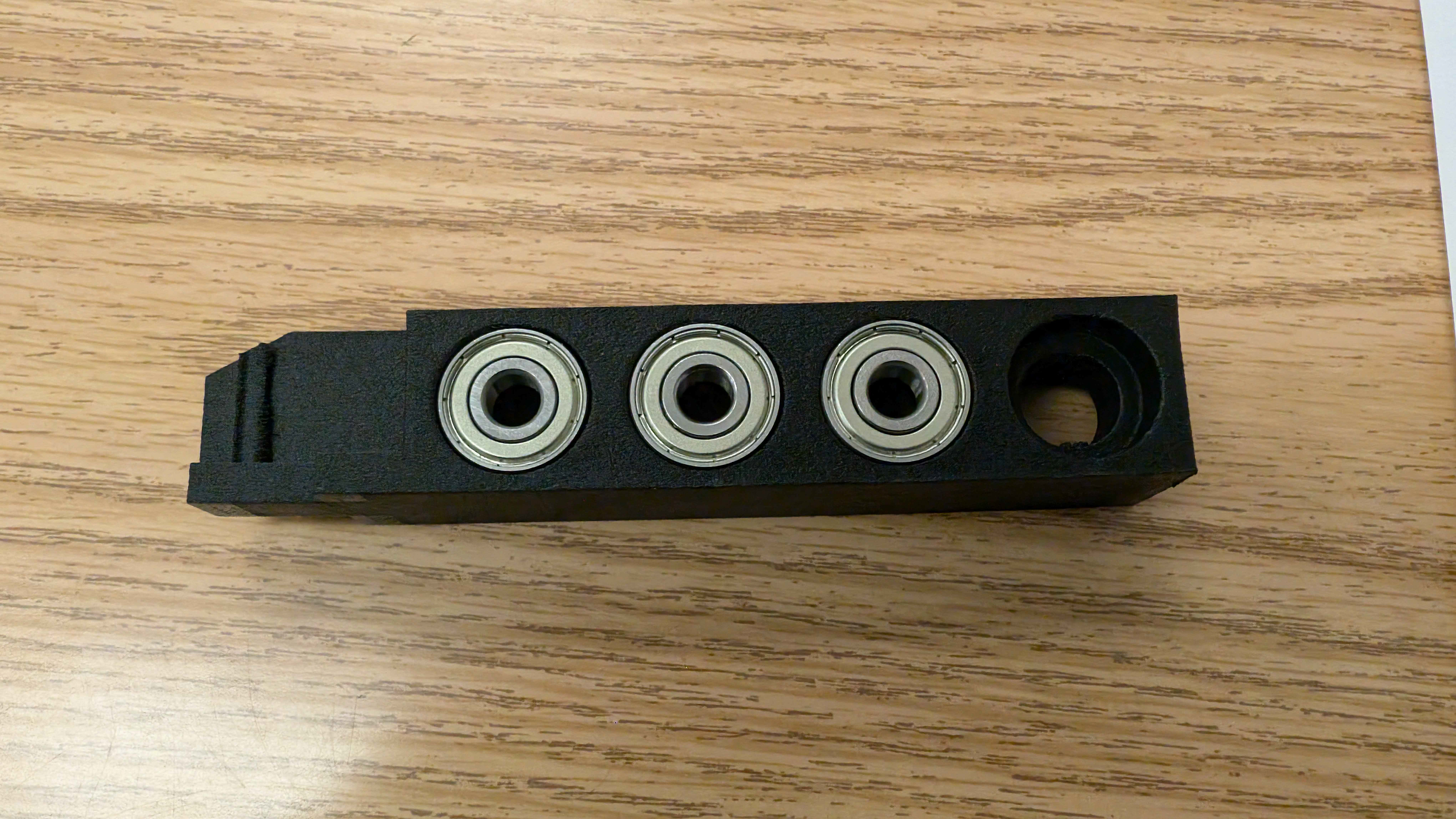
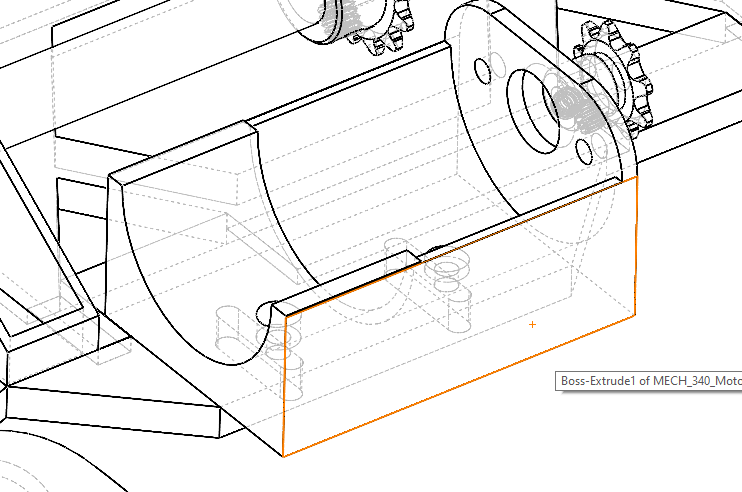
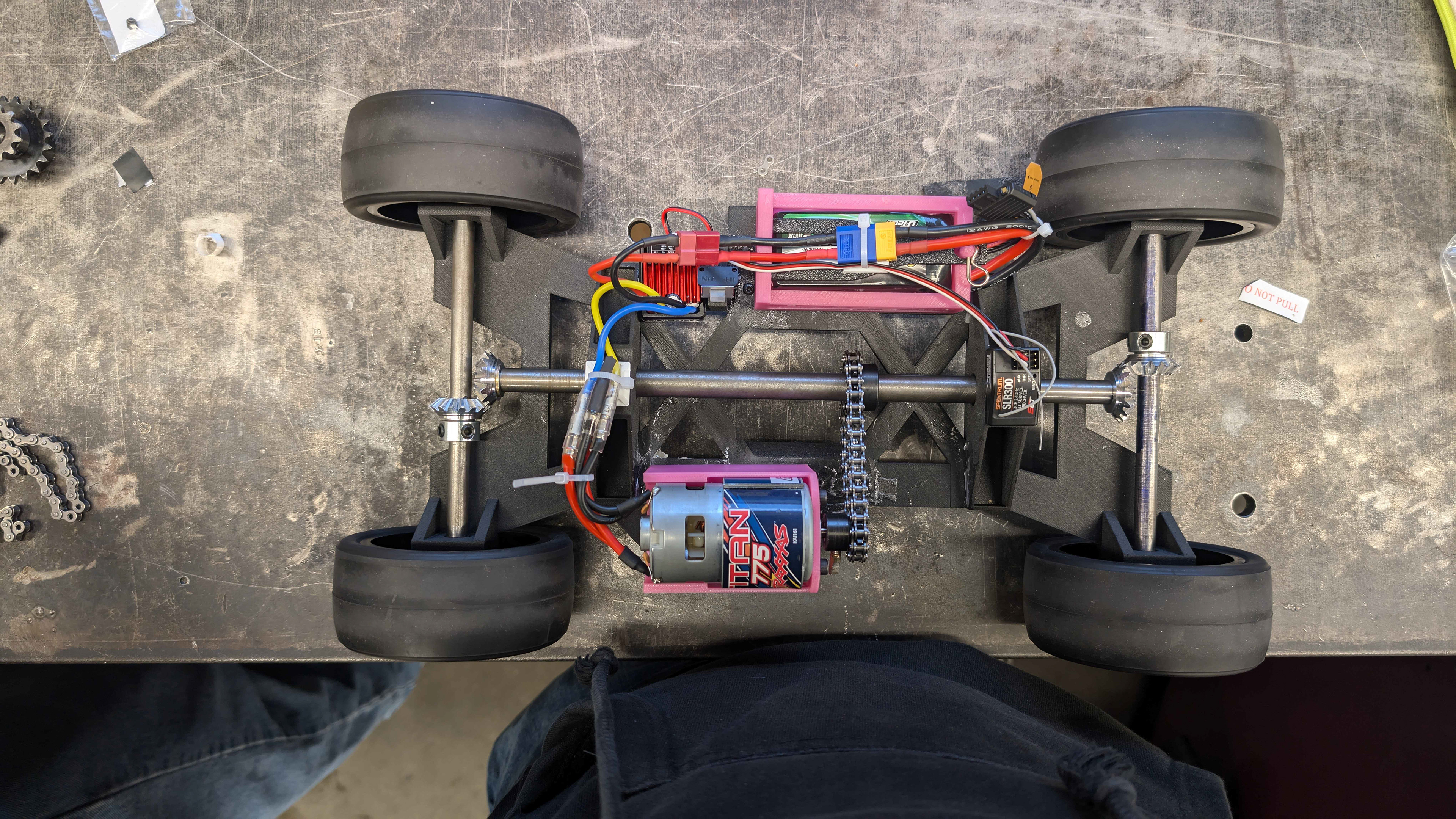
The cross-hatch design was implemented to enhance both bending and torsional stiffness. By incorporating the cross-hatch as a separate component during the bonding process, alignment accuracy was improved, and printing geometry was simplified. After finalizing the chassis design, mounting systems for the motor, motor controller, and battery were developed to ensure secure fastening of all components, reducing the risk of damage during accidents. Adjustable rails were incorporated into the motor mounting system to enable variable tensioning of the chain. Test prints using carbon fiber material were conducted for the bearing pockets to determine the necessary design offsets, accounting for shrinkage, warpage, and sag in the final print. This approach ensured that the bearing mounts were properly sized to securely fasten the bearings to the chassis.
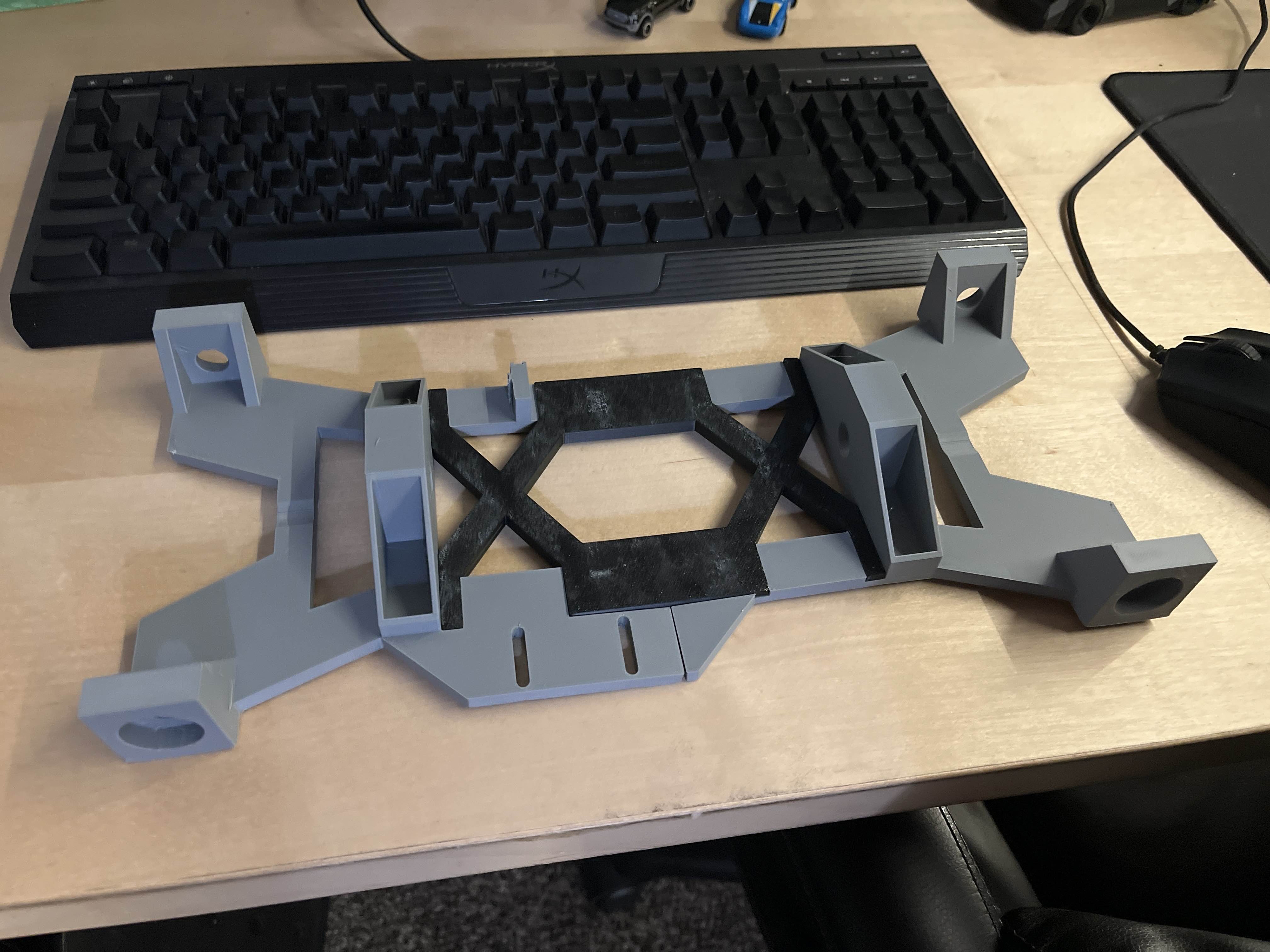

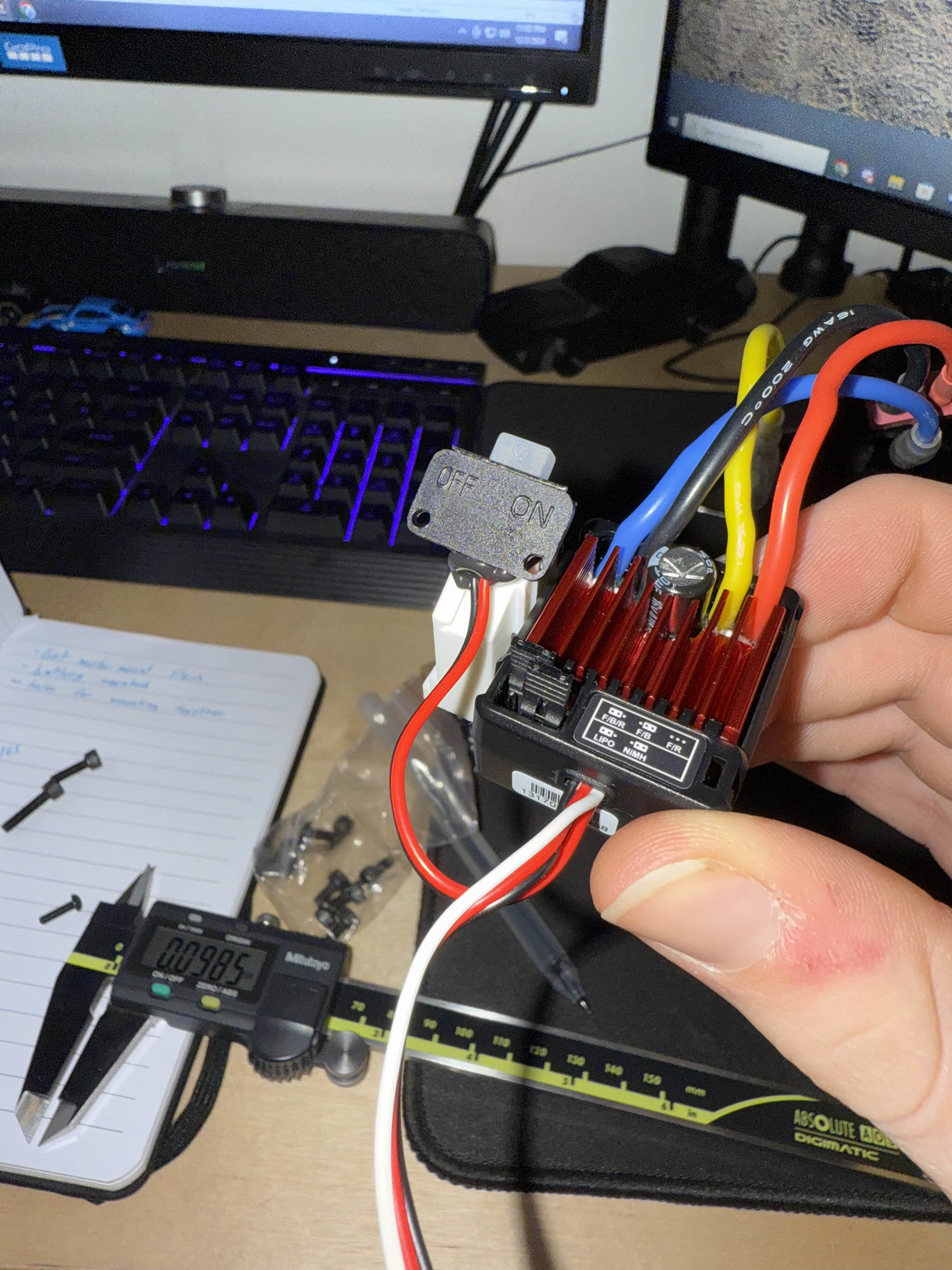
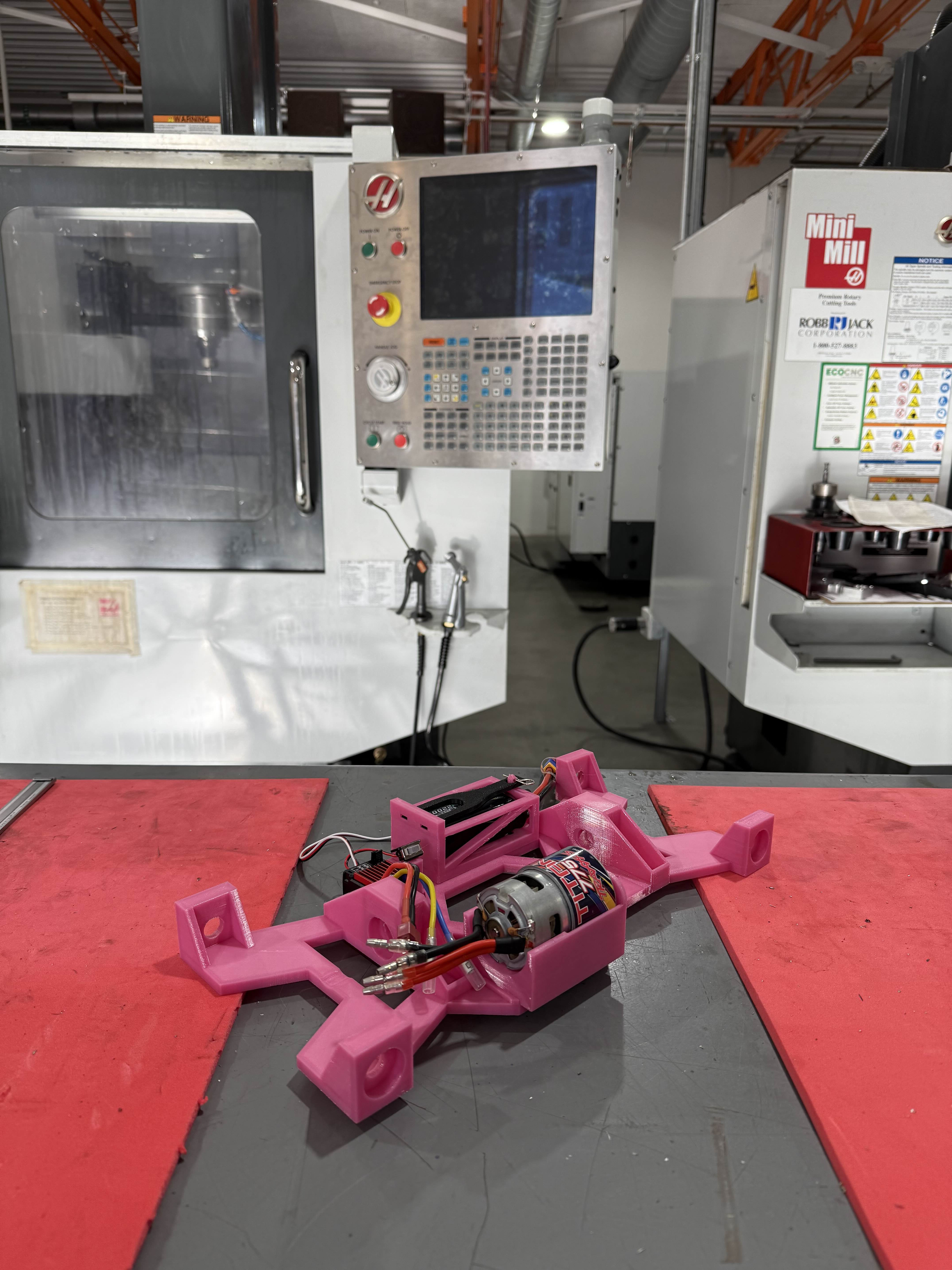
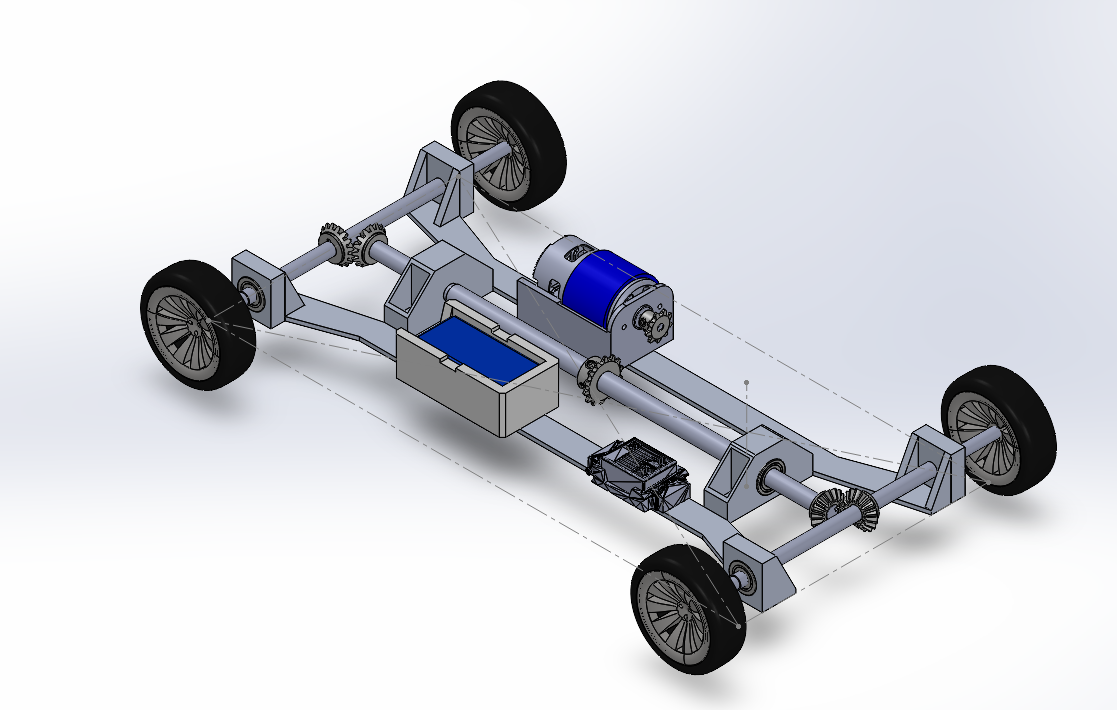
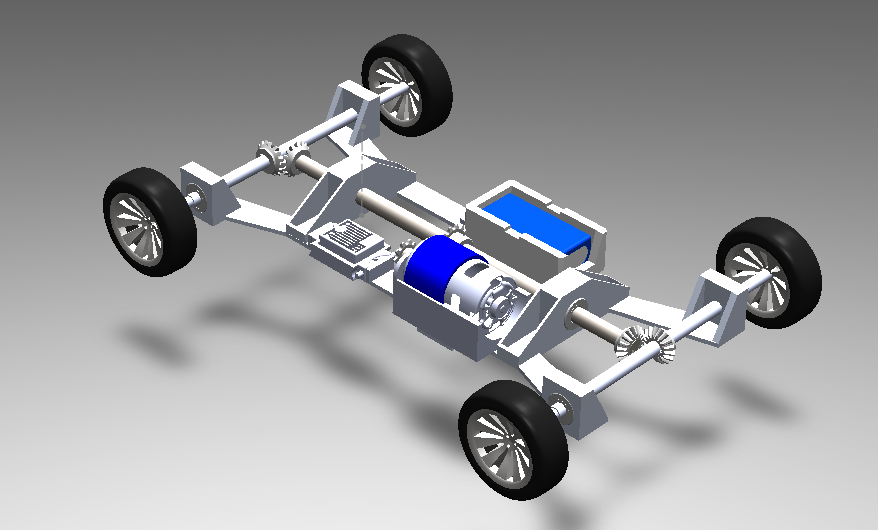
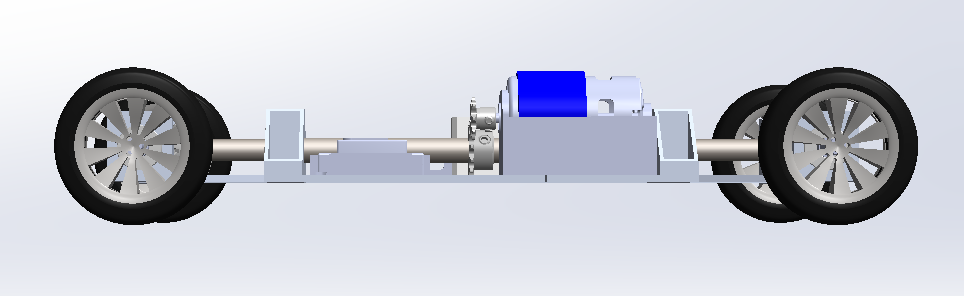
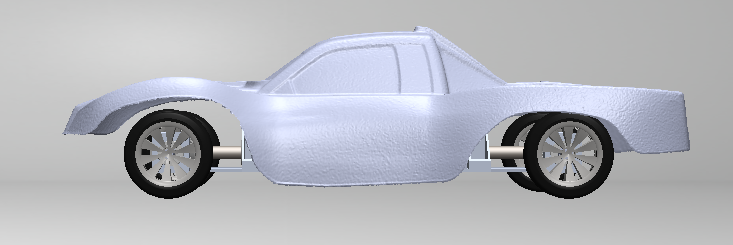
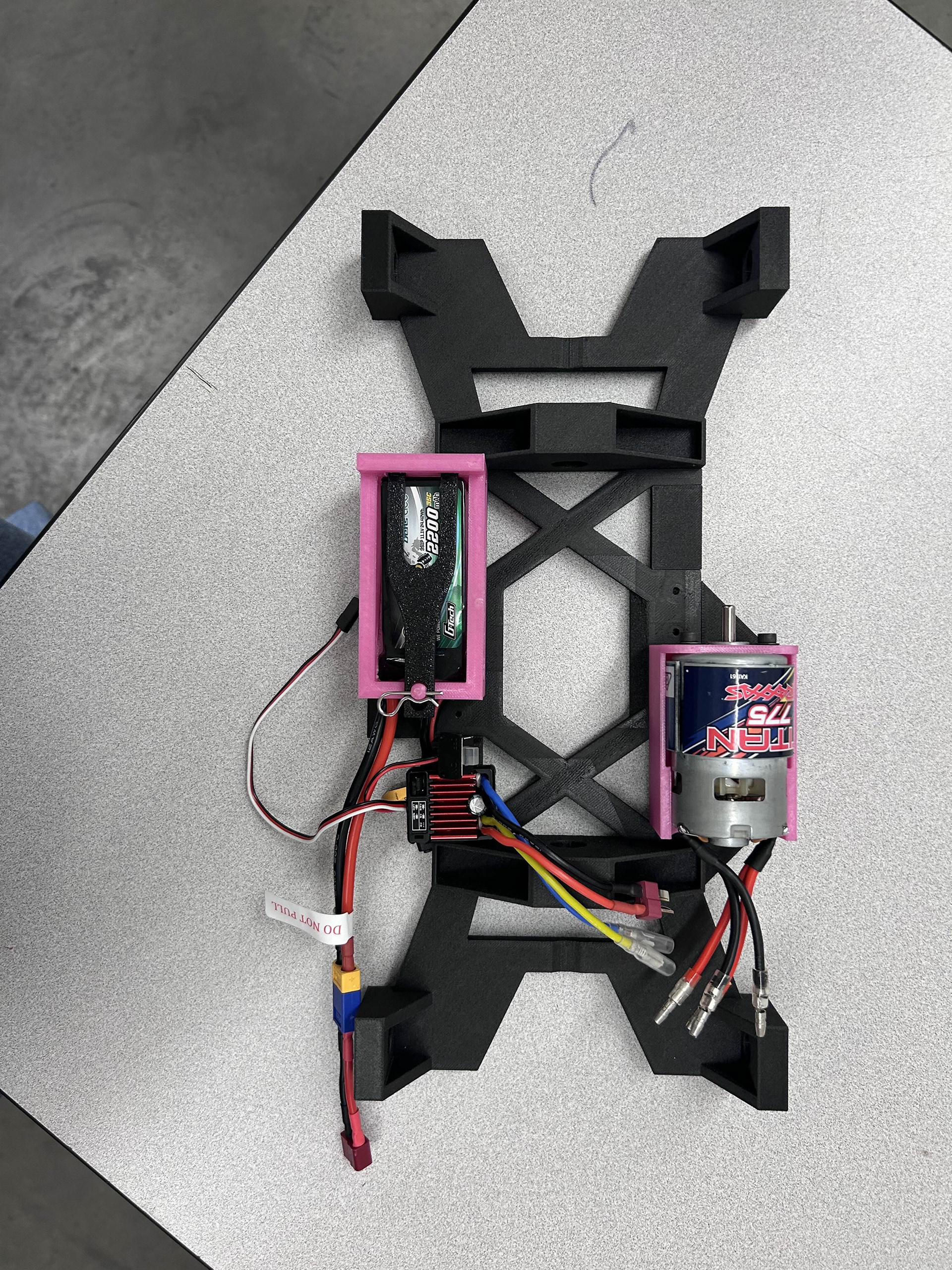
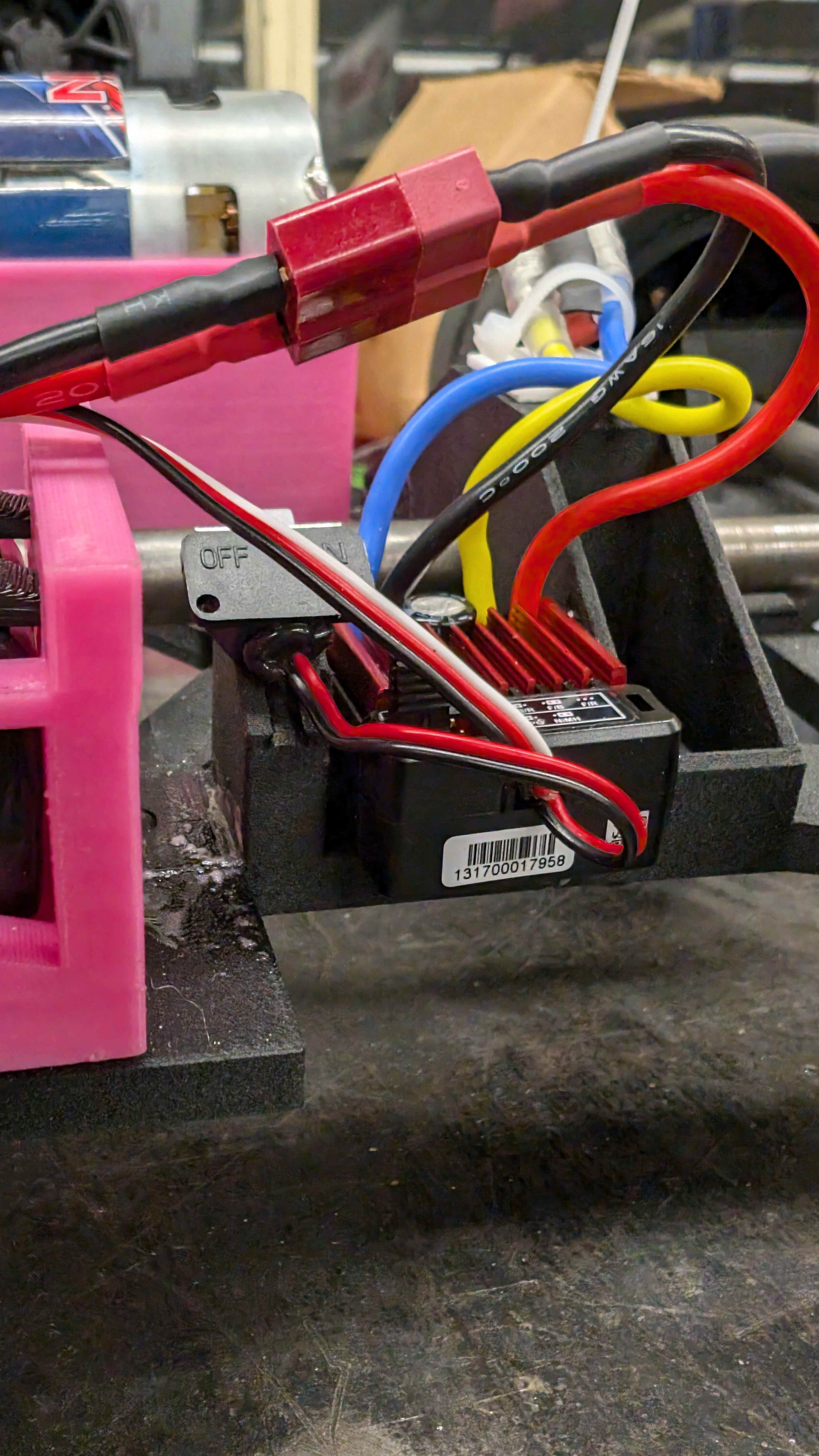
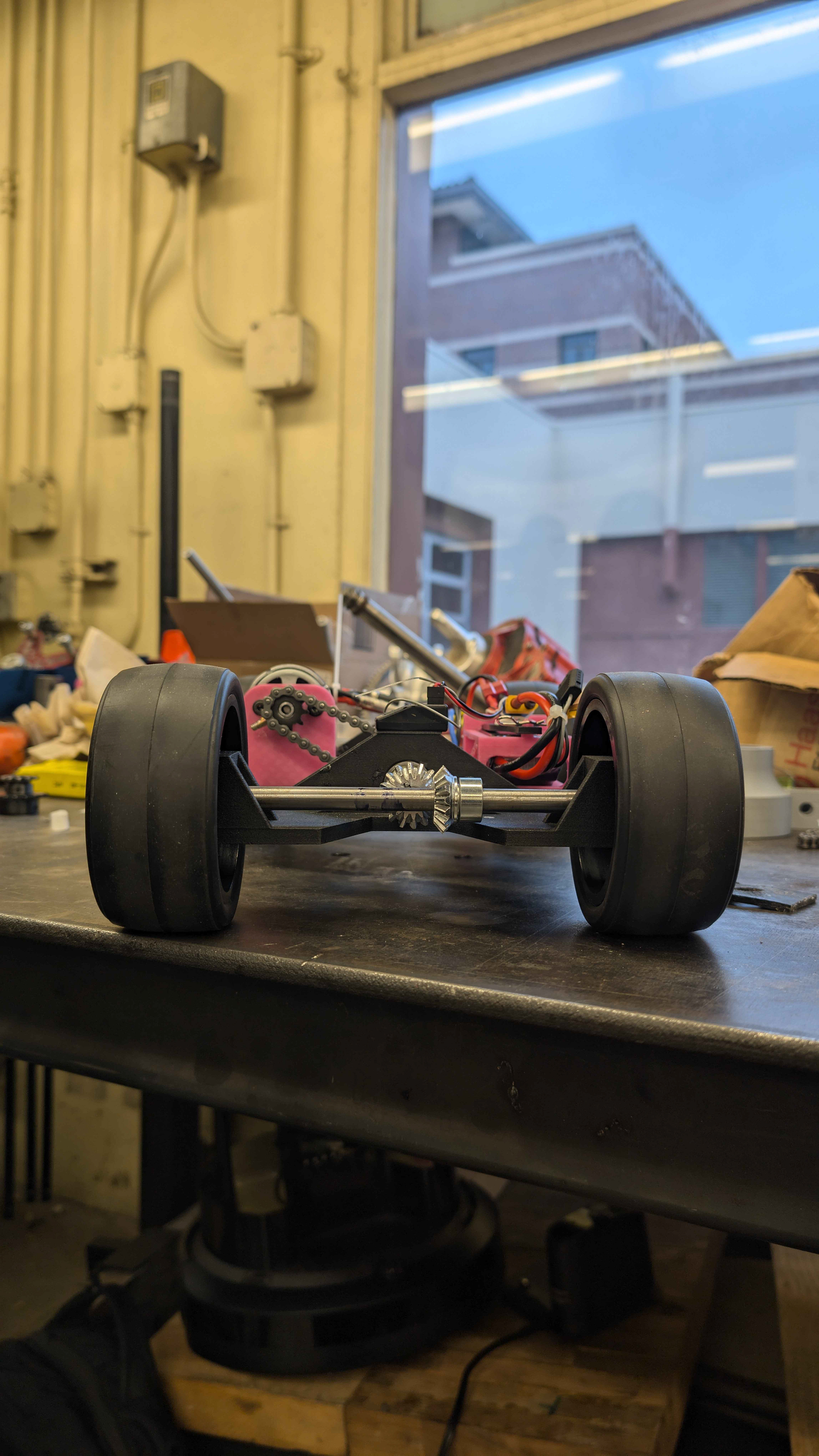
The final product incorporated a 1.41:1 sprocket-and-chain drive system, utilizing bevel gears and keys to efficiently transmit torque to all four wheels. The chassis was precision-engineered through 3D printing with high-temperature polyamide carbon fiber (PAHT-CF) and bonded using high-strength chemical adhesives for enhanced durability. The shafts were manufactured from 12L14 steel, while the motor and battery mounts were produced using Polyethylene Terephthalate Glycol (PETG) for optimal performance. Powering the system was a 2200mAh battery paired with a Traxxas 775 Titan Motor (10-turn, 16.8 volts), delivering reliable and robust operation.




The four-wheel-drive RC car achieved first place overall in a tournament-style competition and successfully completed a 35-degree incline hill climb, demonstrating its exceptional performance and capabilities.
Video is loud towards end
